Program¶
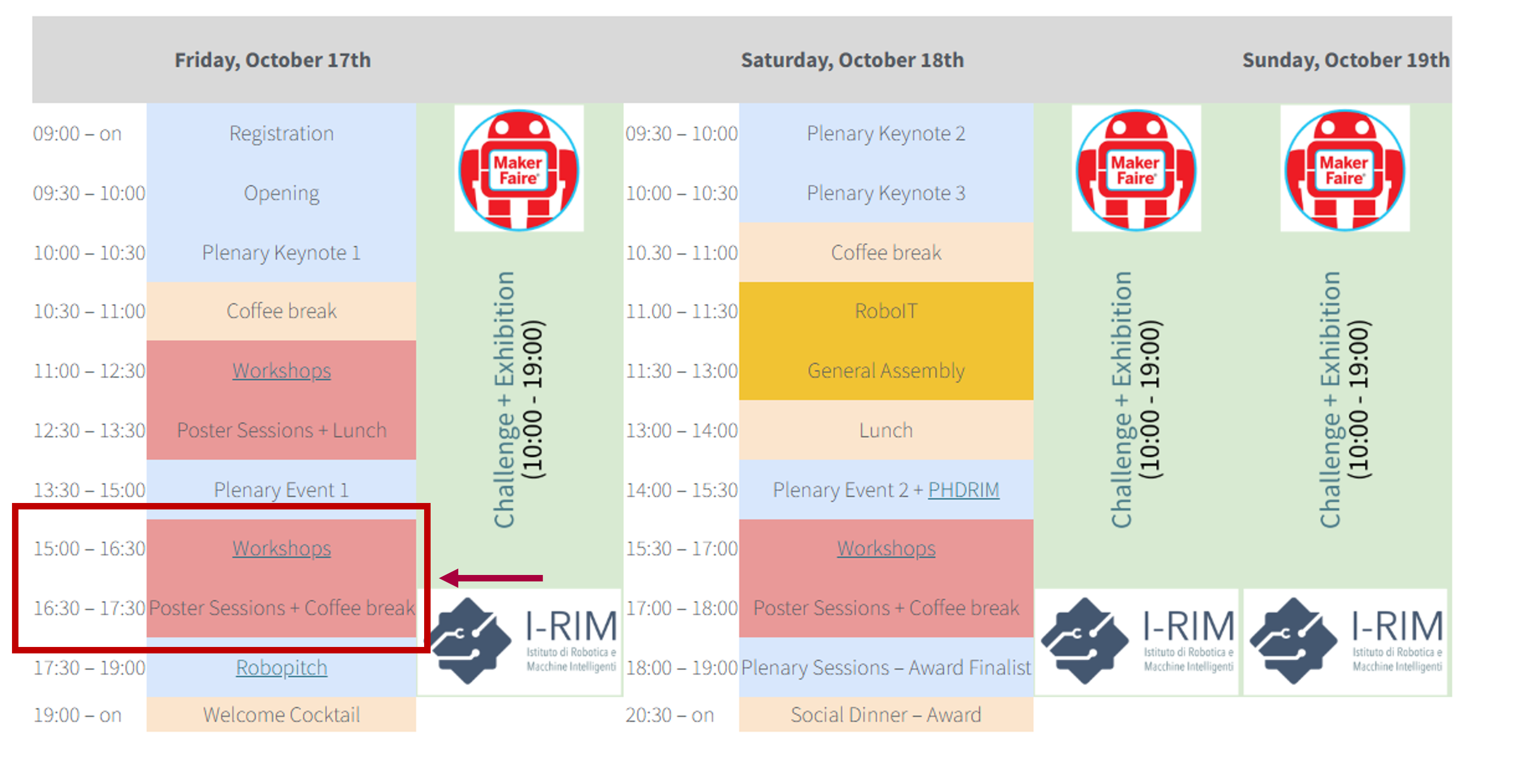
The workshop will take place on Friday the 17th, 2025, in Aula 21, time 15.00-17.30.
The workshop will host 6 keynote speech of 12 minutes each, and 3 minutes for the Q&A from the audience.
After the 90 minute keynote session, there will be an hour of presentations of extended abstract submitted to the workshop.
Keynotes¶
Learn more about the speakers at the dedicated page Invited Speakers!
Time |
Speaker |
Title |
|---|---|---|
— |
Organisers |
Workshop introduction and overview |
15.00 - 15.15 |
Stefano Ghidoni |
Multi-view environment perception for efficient human-robot interaction |
15.15 - 15.30 |
Riccardo Caccavale |
Cognitive Control and Executive Attention for Collaborative Robotics in Industry 5.0 |
15.30 - 15.45 |
Francesca Negrello |
Between research and industry: experiences from the field |
15.45 - 16.00 |
Marco Todescato |
Robotics picking: an applied research perspective |
16.00 - 16.15 |
Domenico Chiaradia |
ARGO: Autonomous Robotic Train Inspection |
16.15 - 16.30 |
Marco Bolignari |
Towards a new generation of robots for extreme environments |
Extended abstract presentations¶
Each accepted extended abstract has 1 minute lightning talk to introduce and promote their work. For enhanced and thorough discussion, a poster presentation will follow.
Time |
|
|---|---|
16.30 - 16.45 |
Lighting abstract presentation |
16.45 - 17.30 |
Poster presentation |
List of presented works:
A Handheld Tactile Perception Device Enabling Defect Detection for Quality Inspection, Michele Pompilio, Gionata Salvietti, Enrico Turco, Nicole D’Aurizio and Domenico Prattichizzo;
Hierarchical Path Planning for Multi-Robot Systems, Marianna Turrà, Silvia Proia, Alessandro Bonetti and Lorenzo Sabattini;
Exploiting redundancy for jerk minimization in robotic manipulators, Giuliano Fabris, Lorenzo Scalera, Paolo Boscariol and Alessandro Gasparetto;
Two-loop decentralized admittance control for a multi-manipulator system, Graziano Carriero, Monica Sileo, Francesco Pierri, Sebastiano Fregnan, Marko Guberina, Yiannis Karayiannidis and Fabrizio Caccavale;
The Traveling Salesman Problem in parallel robotics: definitions, optimization and performance, Giovanni Mottola, Pietro Davide Maddio, Alessandro Cammarata, Rosario Sinatra and Francesca Garescì;
Exploring Supervised and Unsupervised Learning with 1D Autoencoders: Three Case Studies, Adriano Liso and Vito Renò;
Unilateral Telemanipulation System For Operator-Centered Training And Control In Industrial Robotics, Mattia Tafuri, Davide Chiaravalli, Mona Saber Gharamaleki, Claudio Melchiorri, Gianluca Palli and Roberto Meattini;
Analytic Collision Costs for STOMP: A Geometry-Informed Framework for Manipulator Motion Planning, Fabio Mastromarino, Raffaele Carli and Mariagrazia Dotoli;
Test4You: An LLM-based Framework for Enhancing the Software Testing Process, Vincenzo Suriani, Monica Sileo and Domenico Bloisi;
Ergodic control for active sensing of 2D Euclidean surfaces, Veronica Campana, Andrea Del Prete, Luigi Palopoli and Daniele Fontanelli.